Overview¶
Introduction¶
This library implements a communication protocol for a distributed tomographic reconstruction pipeline in which parameters used in the reconstruction can be changed in real-time, taking effect on the running reconstruction code immediately.
The protocol is based on the reconstruction of individual slices, for example orthogonal planes, and is useful for situations where the projection data is to big to reconstruct completely in real-time. The slices are shown together in a 3D interface, and get updated when, for example:
- new (projection) data is available
- more iterations for iterative solvers have been applied
- higher resolution reconstructions are available
The position and orientation of the active slices can be changed, and this is communicated back to the reconstruction cluster, which for future updates will then reconstruct these new slices.
Pipeline¶
For real-time imaging experiments, there are many nodes at work at the same time. A rough overview of the topology that is recommended (but not required) for communication based on TomoPackets is as follows.
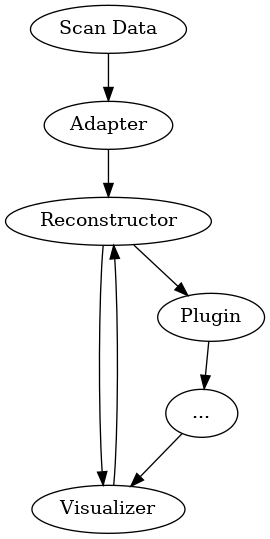
We have the following node types.
- Scan Data. The entry point of the pipeline: data coming from the detector which get pushed into the network. This data can also come from simulations or be prerecorded.
- Adapter. This node is specific to the projection data, and metadata about the acquistion. It converts this application specific data, to a common format that can be used by nodes further down the pipeline that implement the TomoPackets protocol. Some adapter examples can be found in the slicerecon project.
- Reconstructor. This node receives projection data and metadata, and uses it it to fulfil reconstruction requests from visualization nodes further down the line. The slicerecon project implements such a node.
- Plugins. Plugin nodes take reconstructed slices, and postprocess them. For example, for real-time segmentation, artefact removal, other image enhancements, or quantitative analysis of the imaged object. If there are no active plugins, the reconstructed slice given by the reconstructor is sent directly to the visualization node. Example plugins can also be found in the slicerecon project.
- Visualizer. The visualization node shows the reconstructions to a user. When the user changes the slices that are being reconstructed, the visualizer requests a new reconstruction from the reconstructor. An example visualizer is the RECAST3D software.
Packets¶
The communication between nodes happens in a using standardized network packets that contain data, commands, or parameters. Here we give some examples of these packets.
Adapter to Reconstructor¶
The reconstructor needs to receive three types of information from the data adapter.
- Information about where the object is positioned in relation to the
acquisition geometry. This is done using a
tomop.geometry_specification_packet, which defines the minimum and maximum point of a bounding box around the object, which is the physical region to be reconstructed. - Information of the acquisition geometry. This is done using either of the following four packets.
- The projection data. This is done using (multiple)
tomop.projection_packet. The type field of his packet denotes dark (0), bright (1), or ordinary (2) projections.
Reconstructor to and from Visualizer¶
The communication between the reconstructor and visualizer uses the following packets.
- To construct a scene, a
tomop.make_scene_packetis sent to the visualizer. This is done over a REQ/REP channel, the reply is the assigned scene_id which can be used to tag later packets. - After the scene is constructed, the reconstructor waits to receive
tomop.set_slice_packetrequests. - It responds to these packets using a
tomop.slice_data_packet. If there are plugins active, this packet is sent to the first plugin in line, which sends it to the next plugin after it is done processing. The final plugin then sends it to the visualizer.